ECE3 Path Following Car
Project Dates: April 2025 - June 2025
Goals:
- Robotics
- PID
- IR Sensors
- Path Navigation
- Microcontroller Programming
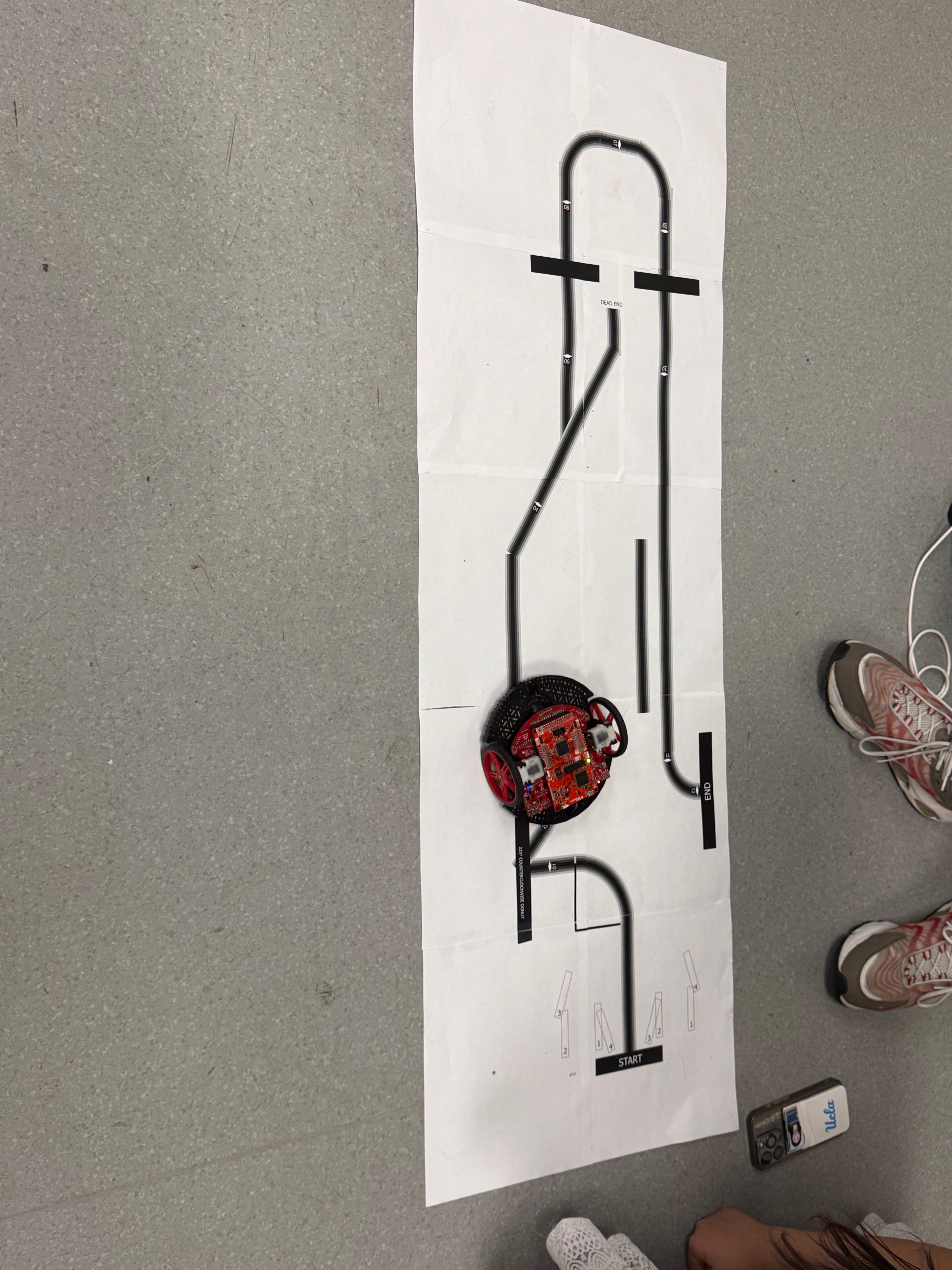
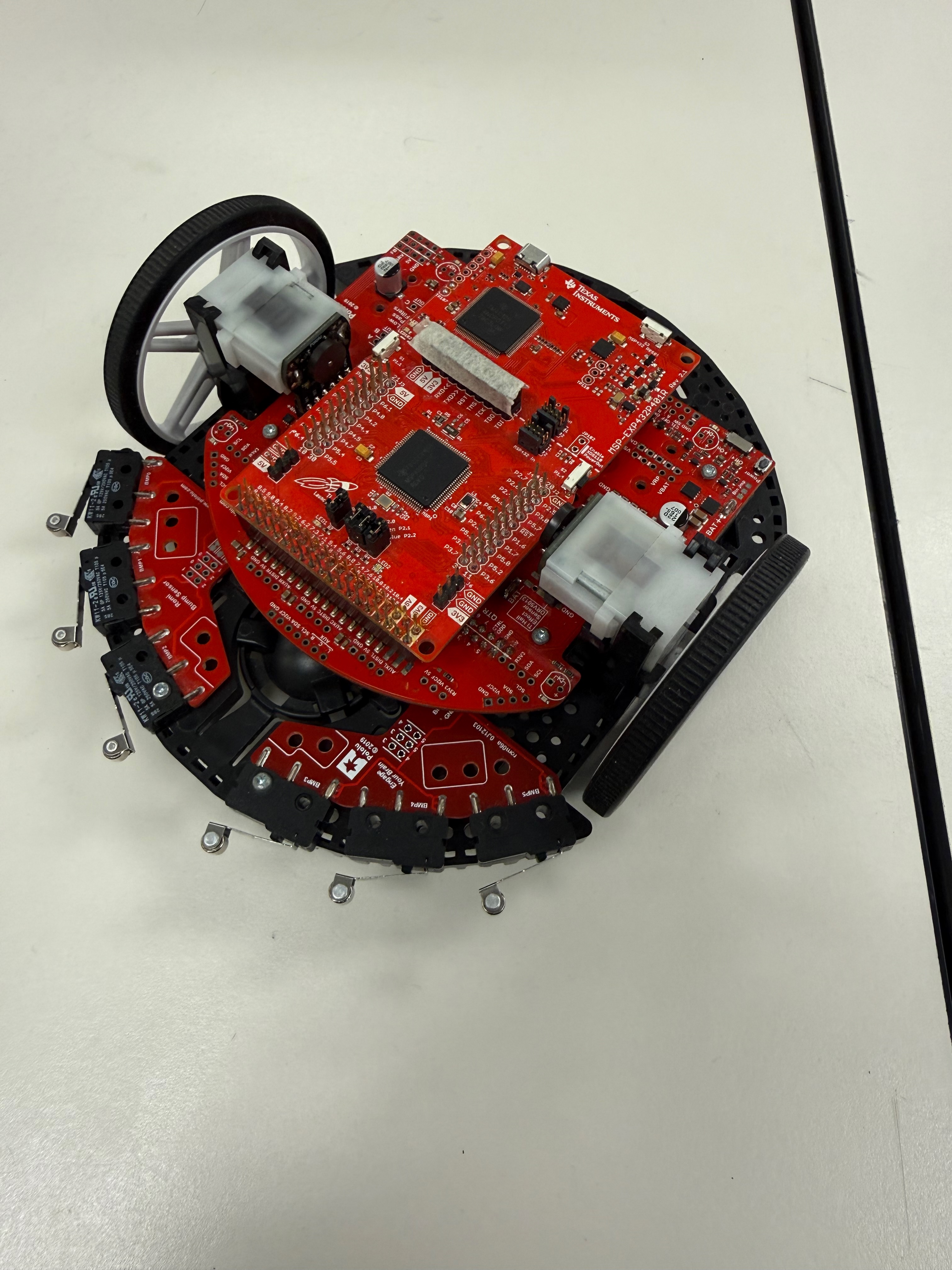
I used a Texas Instruments RSLK (Robot Systems Learning Kit) to build a path-following car. The RSLK includes a variety of sensors and actuators, making it an ideal platform for robotics projects.
For this project, I implemented a PID controller to ensure smooth and accurate path following. The IR sensors detect the line on the ground, and the microcontroller processes this information to adjust the car's speed and direction. The overall goal of the project was to follow the black printed path as accurately and efficiently as possible, while navigating through obstacles such as a split track or sharp turns.
This project was done in collaboration with Aditya Datar as part of UCLA's EC ENGR 3 course - Introduction to Electrical Engineering. I am now currently a lab mentor for this course.
Gallery