Micromouse
Project Dates: October 2024 - May 2025
Goals:
- PCB Design
- Soldering
- Microcontroller Programming
- Motors and Encoders
- IR Sensors
- Maze Navigation
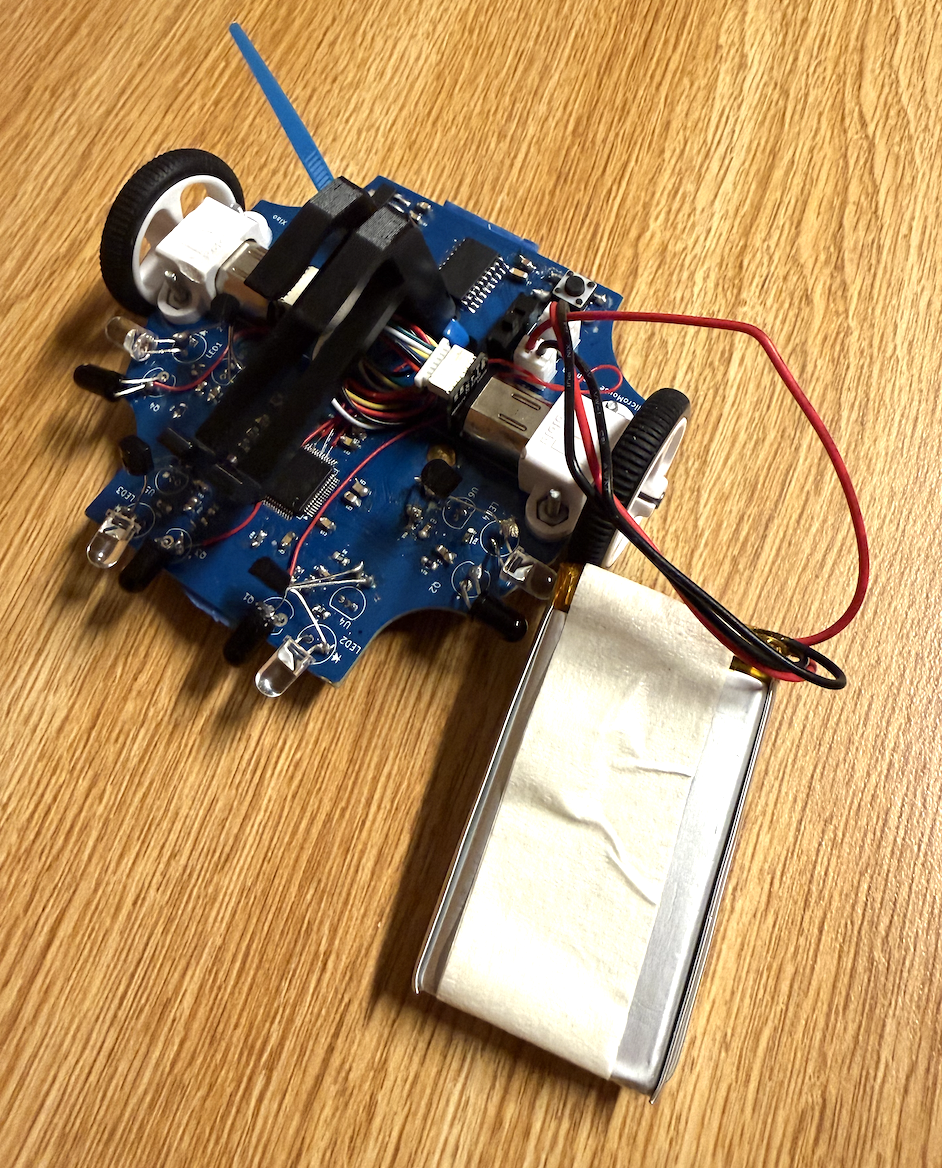
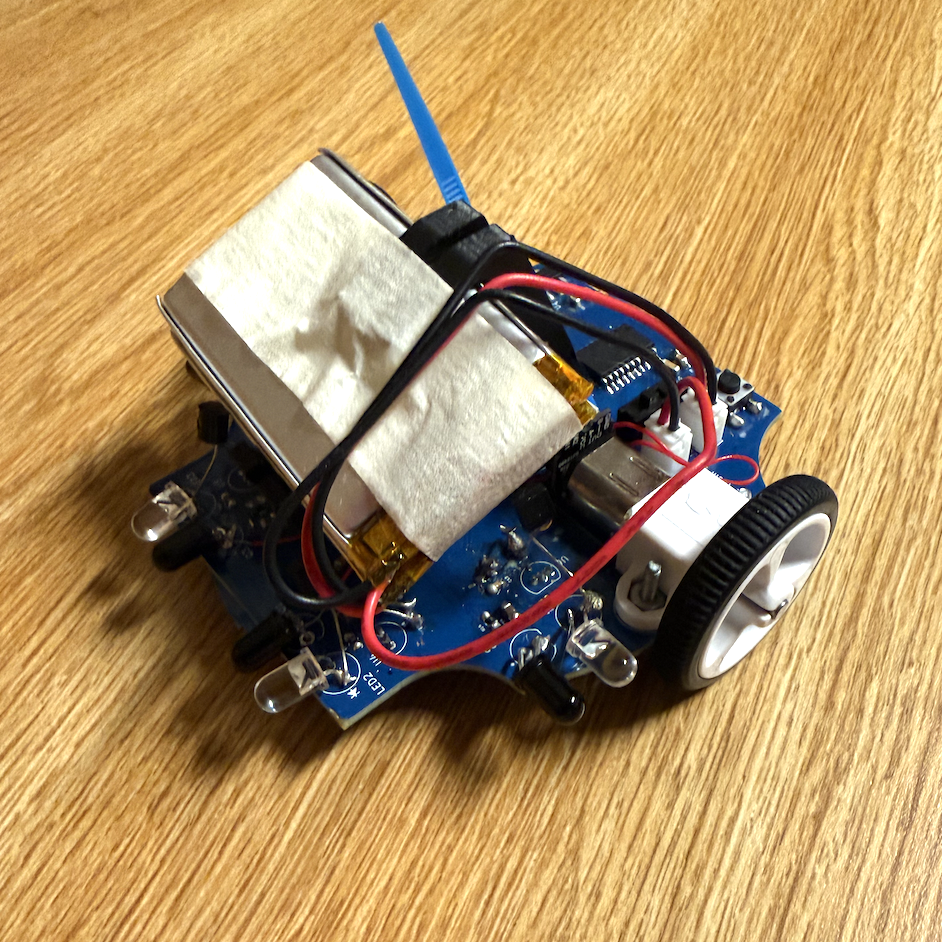
Micromouse is an autonomous, maze-solving robot created entirely from scratch. Using IR sensors, motors with magnetic encoders, a custom PCB, and a Floodfill algorithm, the robot finds its way to the center of a maze through repeated iterations, eventually solving the maze with the most efficient path.
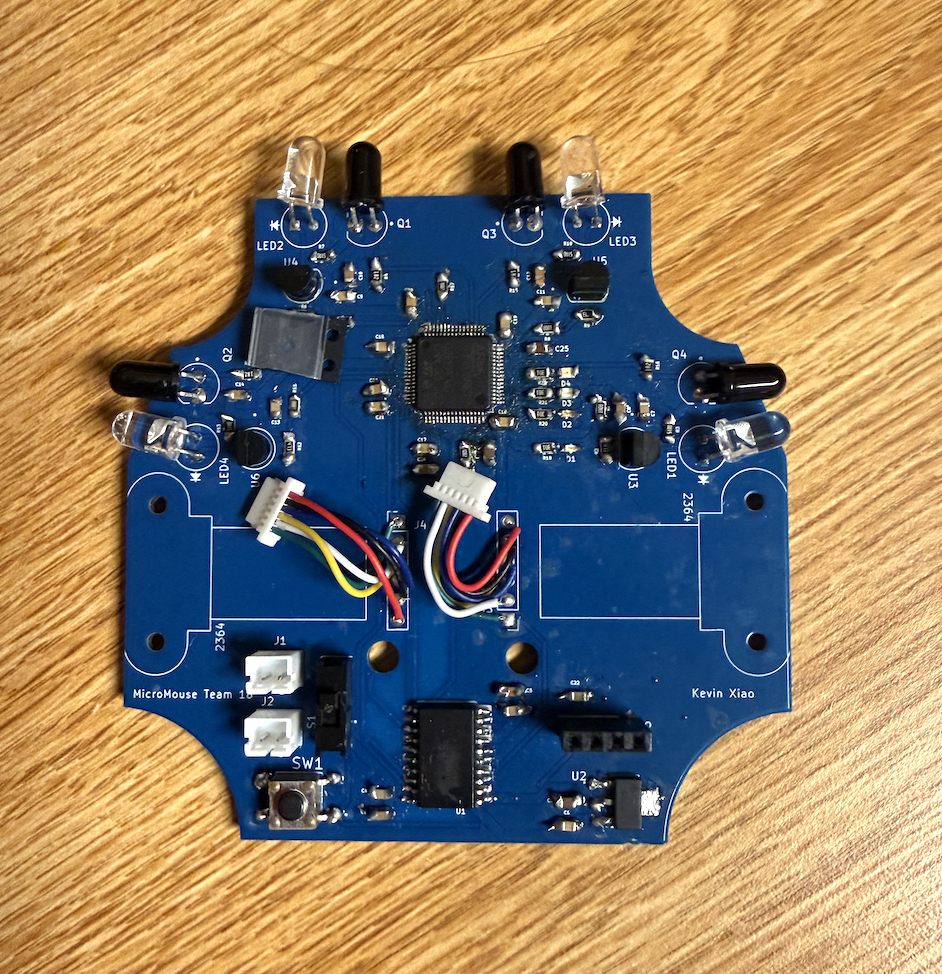
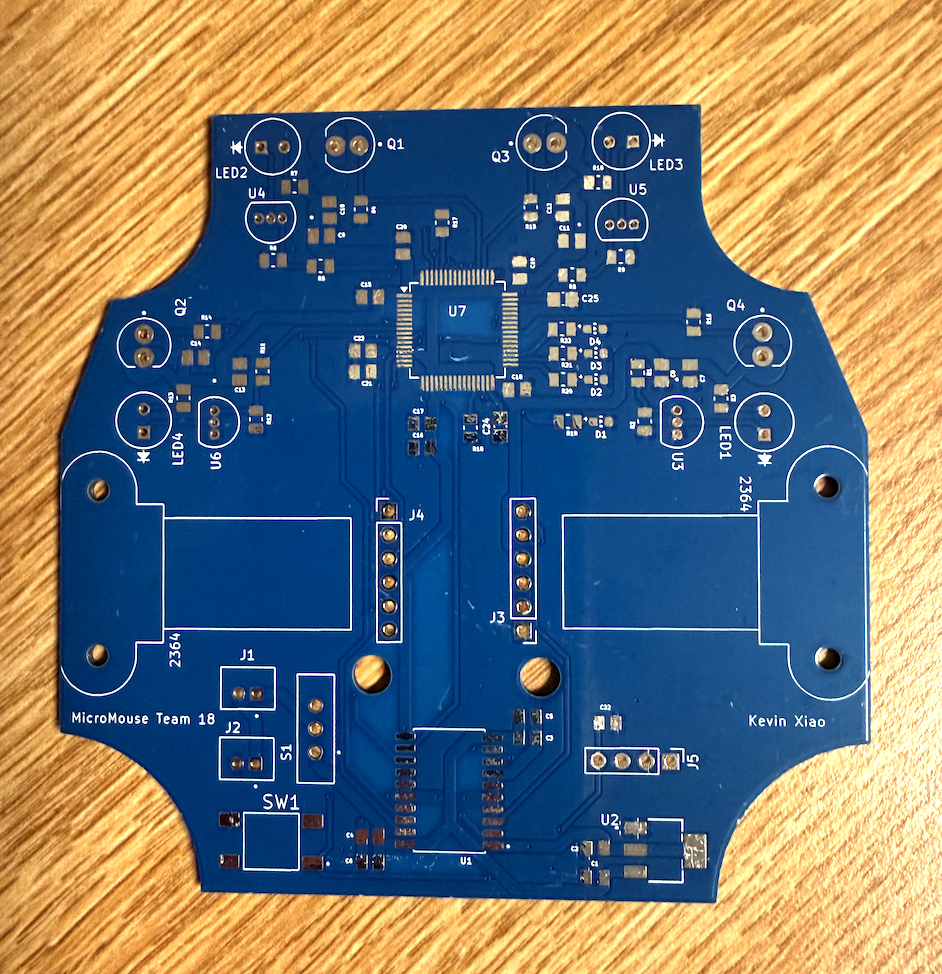
I created a Micromouse by first creating a custom PCB for IR sensors, motors, an MCU (microcontroller unit), and H-Bridge (to control the motors), with a power switch and power LEDs as extra features. I also coded a Floodfill algorithm that would use stacks and queues to solve a maze by adding maze tile objects into the data structures, and upon solving the maze, look for a faster path to the center by going back to the starting point and iterating back and forth.
Upon assembling the mouse, I used PID controllers (proportional, integral, derivative) to callibrate my Micromouse's motors to be able to execute 90˚ turns and drive straight. I then read IR data to detect when there were maze walls surrounding the mouse.
This project culminated in competing in the All-American Micromouse Competition (AAMC) in May of 2025, where students from colleges around the country compete with their Micromouse.
For the 2025-2026 school year, I was selected as the new Micromouse lead, where I teach the project to this year's students. Duties include presenting lectures, hosting worksessions, troubleshooting student mice, reviewing PCBs, and organizing this year's AAMC.
Micromouse II: September 2025 - Present
I plan to redesign my Micromouse, including optimizations to the Floodfill algorithm, PID constants, PCB layout, Battery Holders, and IR sensors and compete in AAMC this upcoming May.
Gallery